History
Battery Supply For the Twin Motors
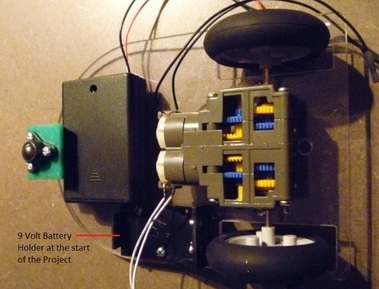
When I started this project I was going to use Two Battery Packs to supply the power for the robot. I used 3 x 1.5 Volt AA Batteries for the sensor circuit and was planning to use a 9 Volt Battery to supply the power for the motors. I calculated that once the voltage had been dropped to 4.5 Volts the battery wouldn't last long enough. I changed to use 3 x 1.5 Volt AA Batteries which worked ok. These batteries were then mounted in single battery holders around to robot, where spaced allowed.
Programming
During programming I found that when the robot was following the left hand wall when the robot would turn right half way through the corner the robot would lose the left hand wall and turn left. I adjusted the program so that the robot would turn right completely before checking the left hand sensor.
6 Volt Supply (V2+)
During testing I tried using 6 Volt supply for the motors (V2+) this increased the speed dramatically but this caused a couple of problems. The problems where experienced for both left and right walls.
1. Due to the speed the distance the robot would travel before checking the left hand sensor meant that it would overshoot most left hand corners. This then meant that the robot would lose the left hand wall so it would keep turning left until it either then drove forward into the wall or just went in circles.
2. When approaching a scenario where the robot would be required to turn right the robot would sometimes travel too far before it checked the sensors. This meant that it would hit the front wall.
3. A inherit problem with the Forward A & Forward B commands is that the motor speed can’t be adjusted to keep both motors running at the same speed. This means that one motor is always faster, as a result the robot would track left or right. This can be accounted for by stopping one motor first to bring the robot back to a straight line. However this became difficult when using 6V supply due to the short motor run time required due to the speed.
1. Due to the speed the distance the robot would travel before checking the left hand sensor meant that it would overshoot most left hand corners. This then meant that the robot would lose the left hand wall so it would keep turning left until it either then drove forward into the wall or just went in circles.
2. When approaching a scenario where the robot would be required to turn right the robot would sometimes travel too far before it checked the sensors. This meant that it would hit the front wall.
3. A inherit problem with the Forward A & Forward B commands is that the motor speed can’t be adjusted to keep both motors running at the same speed. This means that one motor is always faster, as a result the robot would track left or right. This can be accounted for by stopping one motor first to bring the robot back to a straight line. However this became difficult when using 6V supply due to the short motor run time required due to the speed.
Trial Testing
I found during the testing that the batteries which supply the motors (V2+) would lose charge after 2 or 3 runs, this meant the robot would behave differently. This was due to the pause times for the motors remaining constant, but the distance the robot would travel would be less. As a result the cornering characteristics would change dramatically; to keep consistency I found that a regular battery change was required.
