Description
Aims
Sensor Circuit
I choose to use Modulated Infrared for my Left & Right wall sensor circuits, and an Ultrasonic Distance sensor for the front. The reason I choose to use a Modulated Infrared Receiver was that it would eliminate any possible interference from other Infrared source like the Sun. This setup means that accurate distance can not be measured, however by changing the Duty Cycle % for the PWM (Pulse Width Modulation) for the Infrared Emitter. By changing the Duty Cycle % the robot can be programmed to follow the wall within a maximum distance of 150 mm from the wall. Any further then 150 mm the robot senses that there is no wall and turns back to the wall. Using the Ultra sonic distance sensor allowed for easy/accurate distance measuring. The program could be written so that if the distance in front is greater the 100 mm it drives forward, if it is less then 100 mm it turns.
Ultrasonic Distance Sensor

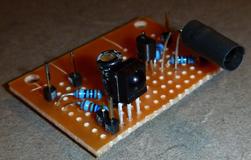
Infrared Sensor Circuit Board
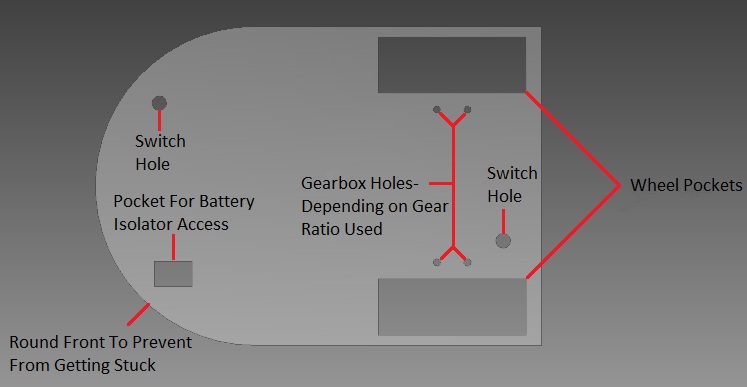
The Base
When I designed the base (chassis) of the robot I designed it with the idea of keeping it as small as possible. I decided to mount the Battery Box to the underside of the base to allow for more room on top for the circuitry, this meant that I needed to mill a small pocket so that the battery isolator could still be used. The width of the base is constrained by the width of the gearbox.